

Robótica industrial
Robots


Efectuamos un estudio previo del proceso para determinar el formato del robot que mejor se adapta a sus necesidades. Nuestra misión es conseguir el éxito de nuestros clientes, identificando sus necesidades, aportando soluciones innovadoras, incrementando la productividad mediante la integración u optimización de sus procesos.
Criterios fundamentales para la elección del tipo de robot:
- Área de trabajo
- Orientación del trabajo a realizar
- Carga y descarga
- Velocidad
- Precisión / Repetibilidad
- Coste
- Integración con otras automatizaciones
- Consideraciones operacionales y soporte

Tipos de robots industriales según el tipo de movimiento básico
- Robots cartesianos
Los robots cartesianos son tipos de robots industriales que pueden hacer 3 movimientos usando diapositivas lineales. Los típicos tienen 3 ejes lineales que están orientados perpendicularmente entre sí. Debido a su estructura rígida, este tipo de robot puede ofrecer buenos niveles de precisión y repetibilidad, ya que, a menores articulaciones, mayor precisión. Adicionalmente, este tipo de robots también son más fáciles de programar.
Dentro de los tipos de robot industriales, el robot cartesiano es el más simple de todos los robots estacionarios y también el más económico del mercado. Para aquellos empresarios que desean empezar en el mundo de la robótica industrial, el robot cartesiano constituye la solución más barata para operaciones simples de selección y colocación. Además, puede ser muy útil para tareas en las que no se requiere un trabajo difícil. Por ejemplo: pegar, soldar, coser, colocar y escoger.
- Robots Scara
Los robots Scara son tipos de robots industriales que pueden hacer 3 movimientos más una rotación, alrededor de un eje vertical. Los típicos tienen 6 ejes que normalmente se montan en un pedestal. Este tipo de robot se desplaza en los planos X, Y y Z como los cartesianos. Pero adicionalmente incorporan un eje al final del plano Z para hacer girar la herramienta al final del brazo.
Gracias a estas prestaciones, los robots Scara son excelentes para para operaciones de ensamblaje vertical, tales como la inserción de pasadores en orificios. Sin embargo, como el brazo es una especie de palanca, eso limita su alcance.
Tipos de robots industriales según el tipo de movimiento especializado
- Robots de 6 ejes
Los robots de 6 ejes son tipos de robots industriales que pueden posicionar completamente su herramienta en una posición previamente dada (3 movimientos) con 3 orientaciones. También son conocidos como robots de 6 grados de libertad. Permiten una mayor flexibilidad y pueden realizar numerosas aplicaciones que robots con menos ejes. Son catalogados como robots colaborativos o cobots.
- Robots cíclicos o redundantes
Los robots redundantes son tipos de robots industriales que pueden posicionar completamente su herramienta en una posición determinada. Sin embargo, mientras que los robots de 6 ejes sólo pueden tener una postura para una determinada posición de la herramienta, los robots redundantes pueden tener una posición determinada de la herramienta bajo diferentes posturas. Es como cuando el brazo humano puede sostener una manija fija mientras que mueve el hombro y el codo.
- Robots de doble brazo
Los robots de doble brazo son tipos de robots industriales que están compuestos de dos brazos trabajando juntos en una pieza de trabajo determinada. Es uno de los más completos y está diseñado con funciones de visión y detección de fuerza. Este tipo de robot puede ejecutar tareas de forma autónoma reconociendo objetos, tomando decisiones y ajustando la cantidad de fuerza aplicada.
Finales de Línea Robotizada
Somos expertos en proporcionar soluciones para cada Final de Línea, adaptando nuestros productos estándar y soluciones a medida para cada necesidad.
Analizamos las necesidades de cada cliente, realizando un Estudio Valorado a priori, y desarrollando posteriormente un Anteproyecto, cuyo objetivo es encontrar la mejor solución en cada caso.
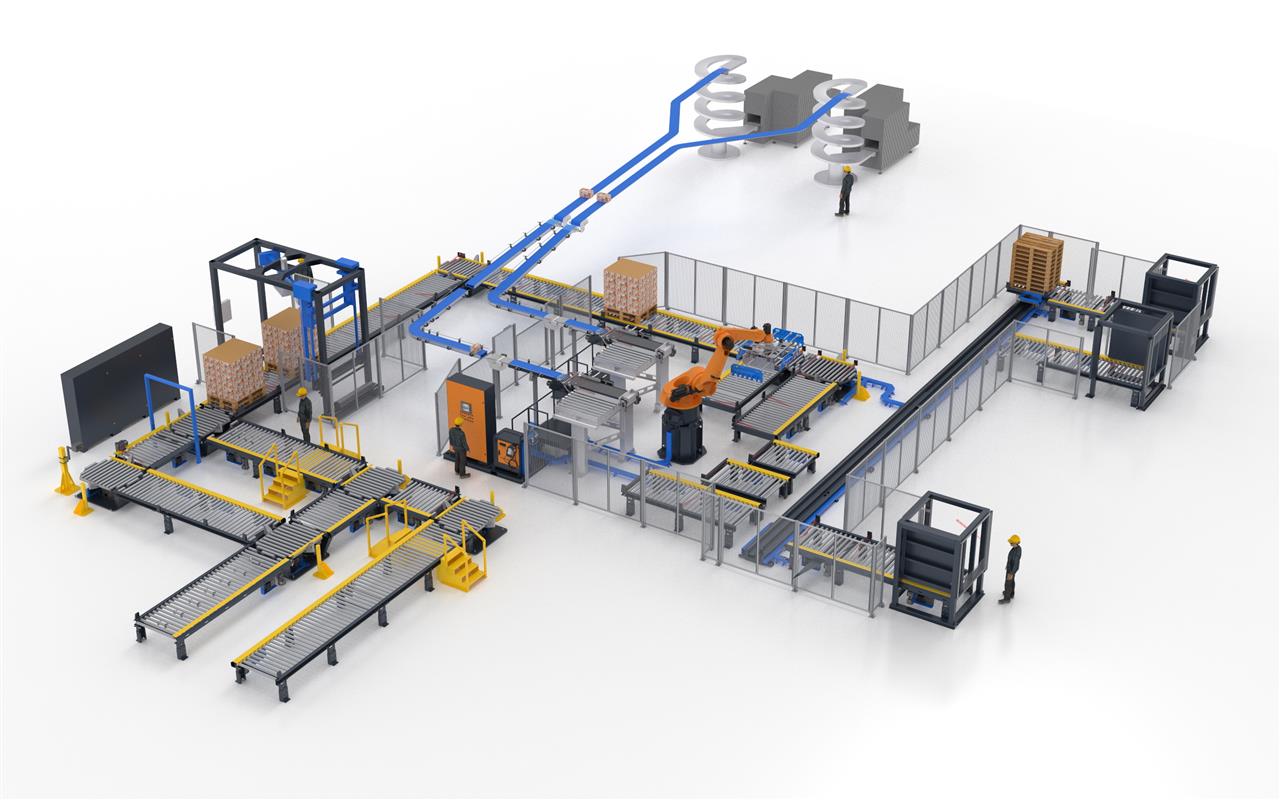
La concreción del proyecto viene dada por los resultados y análisis del anteproyecto, utilizando siempre los mejores medios tanto en desarrollo como en simulación, logrando la mayor optimización y productividad posibles con la ejecución del Proyecto.Paletizado / Despaletizado
La paletización robotizada ofrece gran flexibilidad a la hora de apilar cajas de distintos tamaños y formatos, desde bajas a altas producciones, con posibilidad de diseñar capas de diferentes formatos a gran velocidad respecto a los sistemas de paletizado manual o mediante pórtico.
- Sistemas con identificación y selección de código e identificación de calidad y/o selección de objeto, con sistemas de visión artificial, código de barras, control de trazabilidad, etc
- Manipulaciones de piezas a salida de la cadena de producción para su embalaje, paletizado o carga en contenedor.
- Encontramos la propuesta más adecuada para los procesos de paletizado, despaletizado, empaquetado, embolsado y enfardado de todo tipo de productos: alimentos, piezas delicadas, piezas pesadas, sacos, cajas, botellas, etc…



Aplicaciones
Impacto de la robótica
La Robótica es una nueva tecnología, que surgió como tal, hacia 1960. Han transcurrido pocos años y el interés que ha despertado, desborda cualquier previsión. Quizás, al nacer la Robótica en la era de la información, una propaganda desmedida ha propiciado una imagen irreal a nivel popular y, al igual que sucede con el microprocesador, la mitificación de esta nueva maquina, que de todas formas, nunca dejara de ser eso, una maquina.

APLICACIÓN DE LA ROBÓTICA La noción de robótica implica una cierta idea preconcebida de una estructura mecánica universal capaz de adaptarse, como el hombre, a muy diversos tipos de acciones, destacando en mayor o menor grado, las características de movilidad, programación, autonomía y multifuncionalidad.
Sin embargo, en la actualidad abarca una amplia gama de dispositivos con muy diversos trazos físicos y funcionales asociados a su particular estructura mecánica, a sus características operativas y al campo de aplicación para el cual han sido diseñados. Es importante destacar que todos estos factores están íntimamente relacionados, de tal forma que la configuración y el comportamiento de un robot condicionan su adecuación para un campo determinado de aplicaciones y viceversa, a pesar de la versatibilidad inherente al propio concepto de robot.
Los robots se clasifican según su campo de aplicación en robots industriales y robots de servicios. Van desde robots tortugas en los salones de clases, robots soldadores en la industria automotriz, hasta brazos teleoperadores en el transbordador espacial, lo que evidencia que son utilizados en una diversidad de campos.
Campos de aplicación de la robótica:
Industria
- Trabajos en Fundición
- Aplicación de Transferencia de Material
- Paletización
- Carga y Descarga de Máquinas
- Operaciones de Procesamiento
- Otras Operaciones de Proceso
- Montaje
- Control de Calidad
- Manipulación en Salas Blancas
Robots de Servicio
- Laboratorios
- Industria Nuclear
- Agricultura
- Espacio
- Vehículos Submarinos
- Educación
- Construcción
- Medicina
- Ciencia Ficción

El auge de la Robótica y la imperiosa necesidad de su implantación en numerosas instalaciones industriales, requiere el concurso de un buen número de especialistas en la materia. La Robótica es una tecnología multidisciplinar. Hace uso de todos los recursos de vanguardia de otras ciencias afines, que soportan una parcela de su estructura.
Destacan las siguientes:
- Mecánica
- Cinemática
- Dinámica
- Matemáticas
- Automática
- Electrónica
- Informática
- Energía y actuadores eléctricos, neumáticos e hidráulicos
- Visión artificial
- Sonido de máquinas
- Inteligencia artificial.
Realmente la Robótica es una combinación de todas las disciplinas expuestas, más el conocimiento de la aplicación a la que se enfoca, por lo que su estudio se hace especialmente indicado en las carreras de Ingeniería Superior y Técnica y en los centros de formación profesional, como asignatura practica. También es muy recomendable su estudio en las facultades de informática en las vertientes dedicadas al procesamiento de imágenes, inteligencia artificial, lenguajes de robótica, programación de tareas, etc.
Finalmente, la Robótica brinda a investigadores y doctorados un vasto y variado campo de trabajo, lleno de objetivos y en estado inicial de desarrollo.
La abundante oferta de robots educacionales en el mercado y sus precios competitivos, permiten a los centros de enseñanza complementar un estudio teórico de la Robótica, con las prácticas y ejercicios de experimentación e investigación adecuados.
Una formación en robótica localizada exclusivamente en el control no es la más útil para la mayoría de los estudiantes, que de trabajar con robots lo harán como usuarios y no como fabricantes. Sin embargo, no hay que perder de vista que se esta formando a ingenieros, y que hay que proveerles de los medios adecuados para abordar, de la manera más adecuada, los problemas que puedan surgir en el desarrollo de su profesión.

Impacto en la automatización industrial
El concepto que existía sobre automatización industrial se ha modificado profundamente con la incorporación al mundo del trabajo del robot, que introduce el nuevo vocablo de “sistema de fabricación flexible”, cuya principal característica consiste en la facilidad de adaptación de este núcleo de trabajo, a tareas diferentes de producción.
Las células flexibles de producción se ajustan a necesidades del mercado y están constituidas, básicamente, por grupos de robots, controlados por ordenador. Las células flexibles disminuyen el tiempo del ciclo de trabajo en el taller de un producto y liberan a las personas de trabajos desagradables y monótonos.
La interrelación de las diferentes células flexibles a través de potentes computadores, dará lugar a la factoría totalmente automatizada, de las que ya existen algunas experiencias.Impacto en la competitividad
La adopción de la automatización parcial y global de la fabricación, por parte de las poderosas compañías multinacionales, obliga a todas las demás a seguir sus pasos para mantener su supervivencia.
Cuando el grado de utilización de maquinaria sofisticada es pequeño, la inversión no queda justificada. Para poder compaginar la reducción del número de horas de trabajo de los operarios y sus deseos para que estén emplazadas en el horario normal diurno, con el empleo intensivo de los modernos sistemas de producción, es preciso utilizar nuevas técnicas de fabricación flexible integral.


